22 апреля,
AEX.RU – Специалисты из Массачусетского технологичного института (MIT) создали рабочий прототип дрона, в основу которого заложена методика заряда аккумулятора благодаря подсоединению к обычным линиям электропередач. Об этом сообщает портал
3D News.
Представленная модель из категории миниатюрных беспилотников, которые стремительно набирают сегодня всё большую популярность, предназначена для нужд военных и выполнения длительных по времени тактических задач. Весь процесс подзарядки аппарата будет осуществляться автоматически: БПЛА должен самостоятельно найти источник питания в виде высоковольтной линии и без сторонней помощи выбрать место для аккуратной стыковки при помощи специального механизма.
Изначальной проблемой всех дронов небольших размеров была слишком малая длительность автономной работы, которая в среднем составляла не более 30 минут. И даже применение солнечных панелей не могло решить задачу для подобных конструкций, чьи размеры сопоставимы с габаритами радиоуправляемых моделей. Инженерами Массачусетского института был разработан и воплощён в жизнь механизм, при использовании которого возврат на место базирования для пополнения заряда батареи становился бы без надобности. Но для этого БПЛА должен научиться совершать посадку на обычные провода ЛЭП, как это любят делать пернатые представители фауны.
Самым трудным в реализации проекта был поиск двух ключевых решений: как выбрать эффективный метод автоматического обнаружения линий электропередачи и каким образом осуществлять безопасную для дрона посадку. В первом случае было решено применить принцип магнитометра, что даёт возможность обнаружить создаваемое ЛЭП магнитное поле уже на расстоянии четырёх метров благодаря расположенным в носовой части БПЛА датчикам и вспомогательному оборудованию.
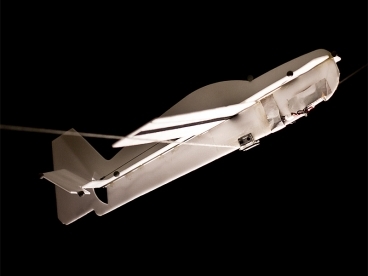
Второй задачей стал выбор методики посадки, при котором не требовалось бы создание аппарата с несущими винтами, как у вертолёта. Отказаться от привычной модели дрона, которая могла бы значительным образом упростить систему самостоятельной посадки, было решено по причине дополнительных затрат энергии, чего не требует самолётная конструкция с неподвижным крылом. Последние достижения в этой области позволили учёным представить крылатую модель БПЛА, соответствующую всем техническим требования для успешной реализации проекта. Однако даже сами разработчики отмечают, что взятый за основу процесс маневрирования во время посадки на провод является достаточно сложной задачей, требующей максимально точное позиционирование беспилотника при больших углах атаки.
Выглядеть в идеальных условиях это должно примерно так.
Хотя представленное выше видео датировано 2010 годом, его авторами являются всё те же сотрудники Массачусетского института, поэтому общая концепция посадки «птицы-БПЛА» будет схожей. На данном этапе механизм зацепления за ЛЭП ещё подвергается существенным доработкам и для тестирования пока что приходится переключать управление в ручной режим. Сам же процесс подзарядки аккумуляторной батареи будет проходить при контакте с токоведущей частью линии.
Кроме MIT созданием миниатюрных дронов-БПЛА занято также и конструкторские бюро ВВС США. Оно планирует разработать технологию, которая позволила бы крошечным летательным аппаратам самостоятельно группироваться в стаи, структурировано перемещаться в воздушном пространстве и совместно атаковать наземные цели. Подобные устройства, как и детище MIT, также должны самостоятельно находить источники электроэнергии в виде воздушных линий электропередачи, садиться на них и восполнять свой заряд для дальнейшего полёта.