Трикоптеры с поворотными роторами научили совместной перевозке грузов
Популярные сервисы по хранению закладок:
Трикоптеры
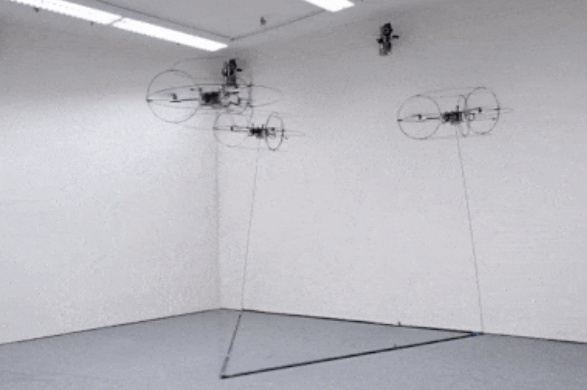
Кадр видео YouTube
16 июля 2018 г., AEX.RU – Немецкие инженеры создали алгоритм управления трикоптерами с поворотными роторами, позволяющий им точно управлять движением подвешенного на тросе груза. В качестве примера разработчики показали полеты одного дрона с тяжелым тросом, а также перемещение груза тремя дронами, способными компенсировать остаточное движение груза в конце маневра. На разработку обратил внимание IEEE Spectrum. Об этом пишет N+1.
Разработчики мультикоптеров учат их не только самостоятельно удерживать свое положение, но и работать вместе с другими дронами. Например, Intel разработала программное обеспечение для синхронизации полета сотен дронов, которое она использует для световых шоу. Но есть и более сложная задача — совместный полет соединенных друг с другом дронов. Как правило, это необходимо для совместной перевозки больших грузов. При этом дрону необходимо не только отслеживать положение соседних летательных аппаратов, но и учитывать при расчете движений, необходимых для сохранения равновесия, влияние соседей и груза, передающих усилие через гибкое соединение, например, трос.
Инженеры из Университета Саара разработали алгоритм для трикоптеров, позволяющий им эффективно компенсировать движение подвешенного груза, чтобы быстро и синхронно перевозить груз в заданную точку. В качестве аппаратной платформы разработчики использовали необычный исследовательский трикоптер, разработанный в 2015 году. Его особенность заключается в том, что двигатели, закрепленные на трех лучах, могут двигаться вокруг лучей и менять угол наклона плоскости винтов относительно земли. За счет этого дрон не так сильно сильно отклоняется при полете в каком-либо направлении, как мультикоптер классической конструкции.
Изначально инженеры создали математическую модель управления дроном с подвешенным гибким и относительно тяжелым тросом. Поскольку трос не жесткий, его движение происходит не синхронно с движением дрона. Модель позволила дрону перевозить трос в заданную точку без остаточного движения. Для этого трикоптер заранее начинает компенсировать движение троса в конце маневра таким образом, чтобы после его окончания трос находился в практически неподвижном положении.
Разработав алгоритм для пустого троса инженеры взялись за более сложную задачу и масштабировали его для нескольких идентичных трикоптеров, перевозящих груз, подвешенный на нескольких тросах. На демонстрационном видео можно видеть, как два и три дрона справляются с синхронной перевозкой металлических конструкций:
Стоит отметить, что во время испытаний дроны управлялись с использованием данных стационарной системы позиционирования. Она состоит из множества высокоскоростных камер, расположенных по периметру помещения и сферических меток на самих дронах и грузах, позволяющих в реальном времени создавать модель всех объектов в кадре.
В прошлом году инженеры из Швейцарской высшей технической школы Цюриха создали алгоритм, позволяющий двум дронам перевозить подвешенный груз без использования такой системы позиционирования. Вместо этого один дрон выступает в качестве ведущего, а второй самостоятельно отслеживает его положение, наблюдая за меткой на корпусе. Кроме того, они научили двух дронов сообща создавать веревочную переправу, а также перекидывать друг на друга шест и самостоятельно делать сальто с незакрепленным шестом.