Дрон "научили" кататься на колесе для экономии энергии
Популярные сервисы по хранению закладок:
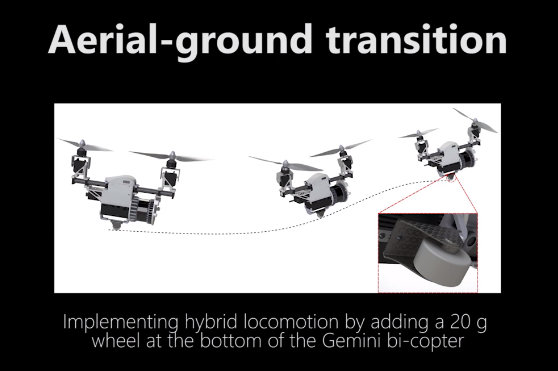
БПЛА на колесе
Кадр презентации проекта на Youtube
9 ноября 2020 г., AEX.RU – Гонконгские инженеры собрали бикоптер с пассивным колесом в нижней части корпуса. Это позволяет ему опираться на колесо и катиться по полу, управляя движением при помощи наклонных винтов. В таком положении дрон потребляет на 61 процент меньше энергии, чем в полете. Статья была представлена на конференции IROS 2020, а ее препринт опубликован на arXiv.org. Об этом пишет N+1.
Дроны имеют неоспоримое преимущество перед колесными роботами в универсальности: они могут перемещаться как в плоскости недалеко от поверхности, так и подниматься для облета препятствий. Но в полете они потребляют гораздо больше энергии, чем колесные и даже ходячие роботы. Для совмещения преимуществ летающих дронов и ездящих роботов есть два подхода: сделать универсальный аппарат или два отдельных, оптимизированных под свои задачи.
В универсальных дронах с колесами, как правило, устанавливают полноценные четыре колеса с отдельными моторами, а иногда и с поворотными механизмами. Это повышает массу робота и заметно влияет на его время полета и массу полезной нагрузки.
Инженеры под руководством Юмина Циня (Youming Qin) из Университета Гонконга разработали бикоптер с одним небольшим пассивным колесом, который управляет ездой с помощи тех же винтов, которые позволяют ему летать. Дрон использует два мотора с винтами, которые закреплены на поворотном механизме. Это позволяет независимо наклонять винты в сторону от продольной оси, что, к примеру, необходимо для вращения дрона. Общая масса дрона составляет 1950 граммов. Помимо основных компонентов в нее входит 500-граммовый макет лидара, потому что изначально инженеры создавали дрон для составления высокоточных карт помещений в полете.
В нижней части корпуса авторы установили пассивное колесо. Оно имеет массу 20 грамм и установлено почти ровно под центром масс дрона, что помогает в поддержании баланса. Если дрону не нужен полет на высоте, он может приземлиться на колесо и продолжить перемещаться в нужную ему сторону, опираясь на колесо. При этом ему необходимо продолжать использовать винты для того, чтобы не падать, но на гораздо меньшей частоте вращения.
При езде на колесе дрон едет вперед, ориентируя корпус по направлению движения и меняя соотношение тяги на винтах (передний винт вращается с меньшей скоростью, чем задний). А для поворота он немного наклоняет набок винты в разные стороны. Во время экспериментов авторы показали, что дрон может мягко приземляться на пол, не сильно наклоняясь при этом, а также способен достаточно точно проехать «восьмерку».
Другой эксперимент показал преимущество новой конструкции перед дроном без колес. Инженеры сравнили энергопотребление дрона в трех состояниях: зависании на месте, езде на колесе и стоянии на нем. Как и ожидалось, наибольшую мощность дрон потребляет при зависании в воздухе: 455 ватт. Стоя на месте и опираясь на колесо он потребляет 106 ватт, а при езде на колесе потребляемая мощность возрастает до 176 ватт, что все равно на 61 процент меньше, чем при полете в воздухе.